
























博雅工道S-Cleaner净航者Ⅰ,面向水域清洁的智能化无人作业系统
水面漂浮垃圾污染已成为当前我国各水域面临的普遍问题。传统的人工打捞方式劳动强度大、效率难以保障,而燃油驱动型机械捞船在作业过程中存在二次污染风险,难以满足当前水域环保作业的实际需求。
针对上述问题,博雅工道依托在无人装备智能控制领域的技术积累,最新研发推出“净航者Ⅰ S-Cleaner”型水域清洁无人船系统。
/ 系统组成
净航者Ⅰ由三个核心单元构成:无人船、水域接驳无人码头及远程控制中心。
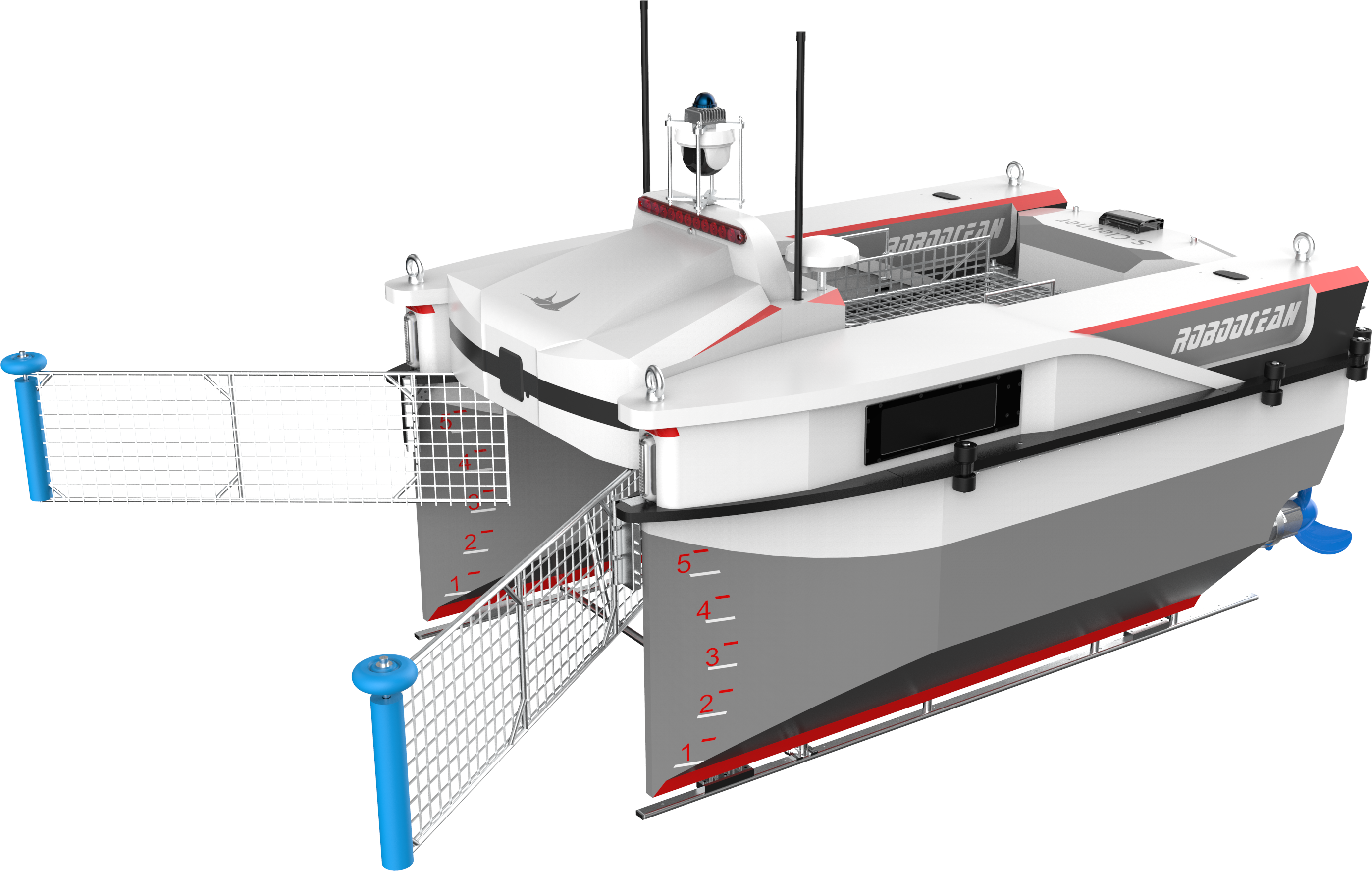
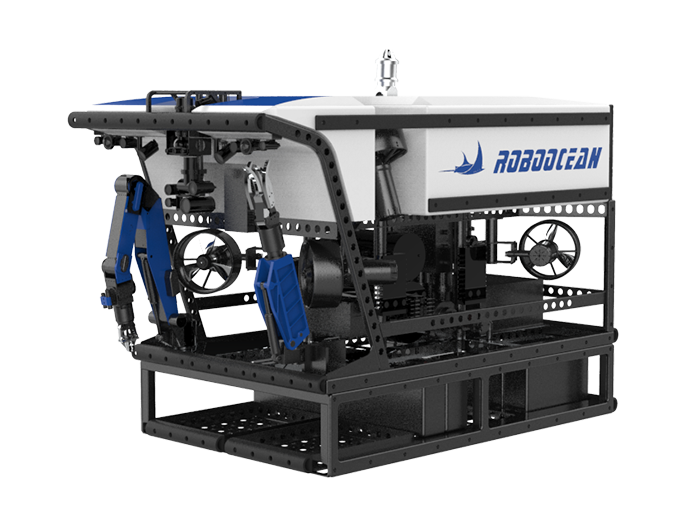
无人船是水面作业的执行单元,搭载水面感知识别系统、垃圾收纳装置及高精度定位系统,具备自主垃圾识别与清理能力。船体采用双体动力船型,可在1米以上水深的近岸港口、内陆景区、河流湖泊及水库等水域稳定作业。
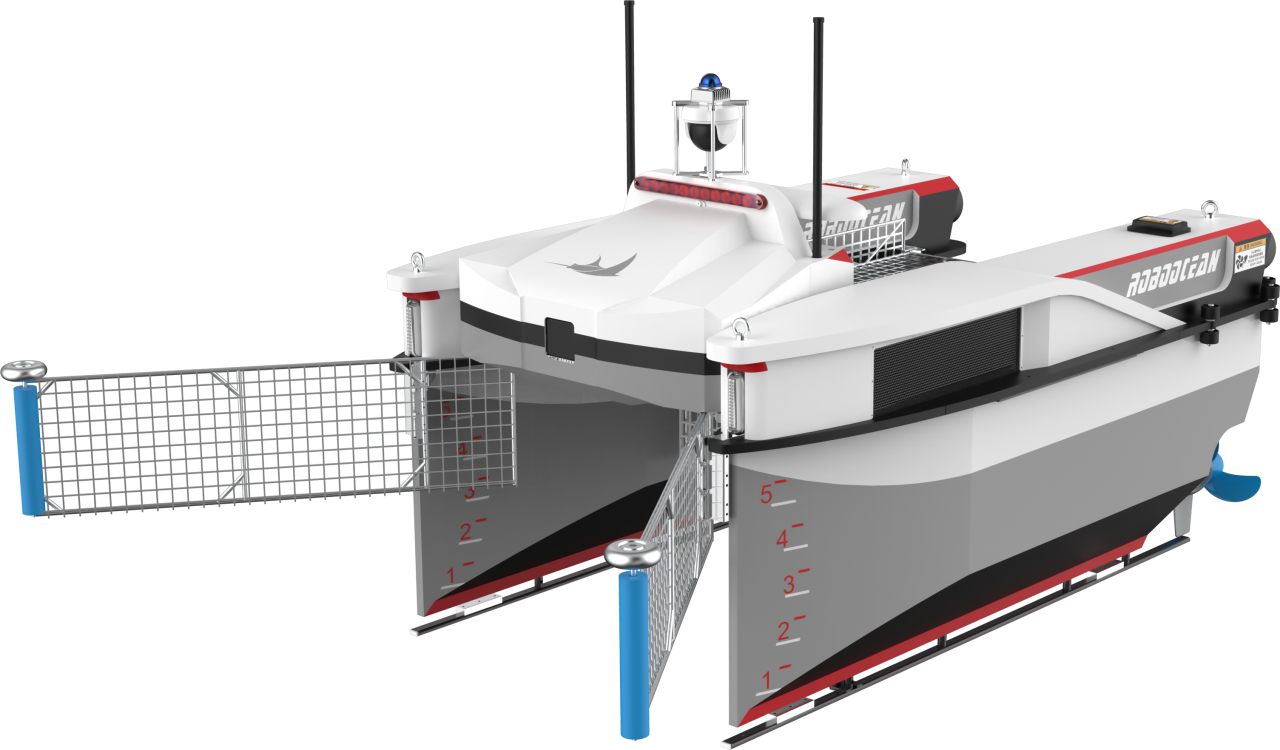
图:净航者Ⅰ S-Cleaner
水域接驳无人码头作为系统的通信中继和无人船的靠泊与能源保障单元,采用电台、4G/5G及WiFi等多种通讯方式,实现数据与指令传输。码头可为无人船提供自动充电及靠泊服务,满足系统长期无人值守作业需求。根据应用环境不同,可选用岸基电台、简易码头或精装码头三种构型。
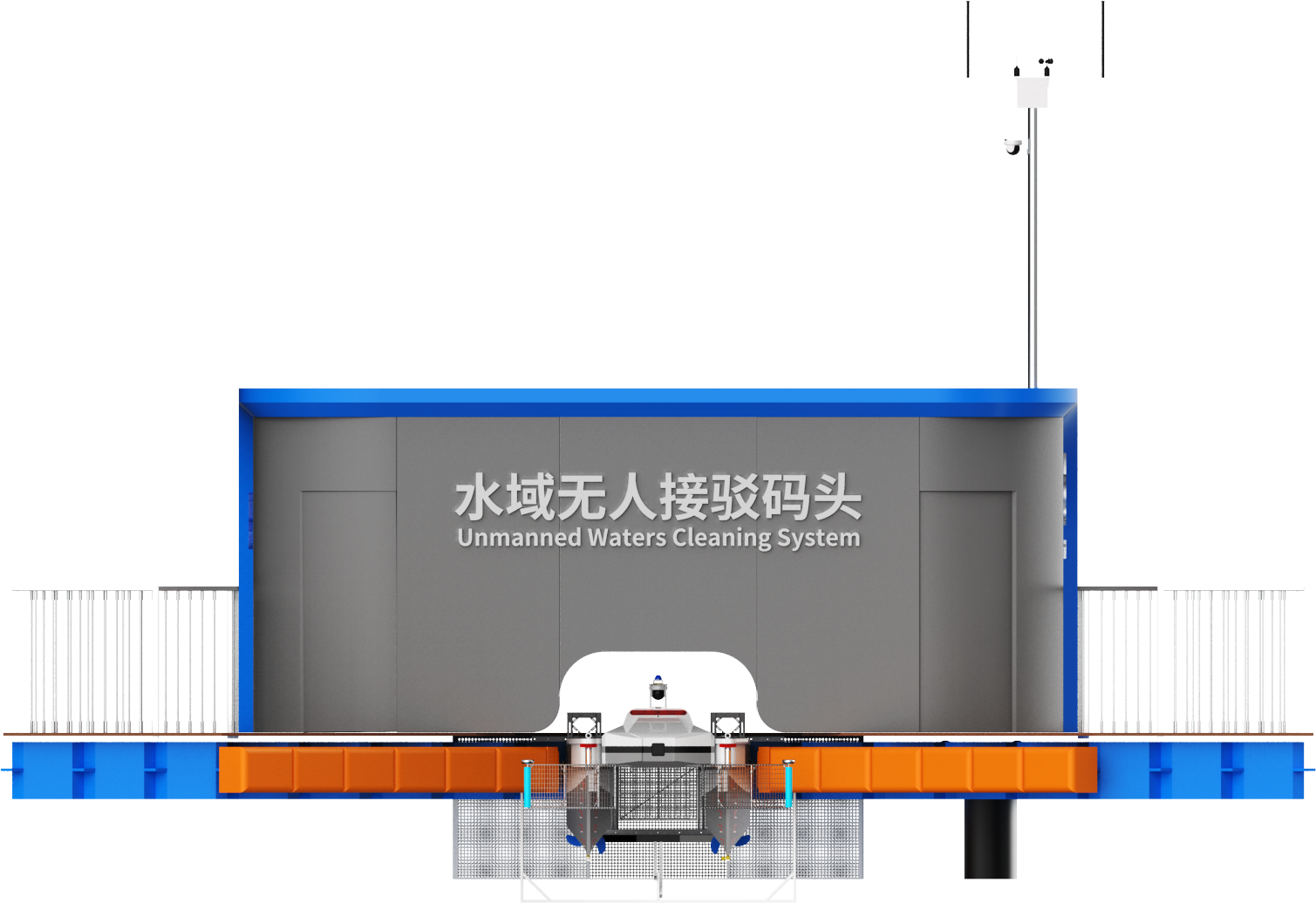
图:水域接驳无人码头 S-Wharf
远程控制中心是主要的人机交互界面,采用可视化操控手柄设计,具备无人船实时操控及数据读取功能,支持任务规划与状态监控。

图:远程控制中心 S-Center
/ 关键技术能力
自主航行与避障
净航者Ⅰ内置路径规划、自主避障、定向定速航行及定点悬停等智能控制算法。
操作人员可在任务地图界面设定多个坐标点,系统自动规划路径并完成航行任务。针对重复性工作,系统支持历史路径导入,实现一键部署。
在指定区域清洁或检测任务中,系统可自动规划扫测路径,完成目标区域的自主作业。航行轨迹实时显示于上位机界面,历史航行数据支持存储与回放。

图:净航者Ⅰ S-Cleaner自主避障
水面垃圾识别与自动清理
净航者Ⅰ配置模块化垃圾清理装置,采用流式水面漂浮垃圾连续动态收集技术。
航行过程中,系统依托视觉信息对水面垃圾进行实时识别,识别到目标后,无人船自动调整航向执行清理作业,完成后回归预定路径。
针对垃圾舱满载情况,无人船返回码头后,可通过码头上设置的大型垃圾存储装置完成垃圾自动转运,支持多批次连续作业。垃圾舱容量可满足单次长时间作业需求,清理效率达亩级每小时。
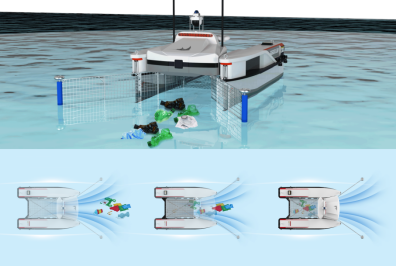
图:净航者Ⅰ S-Cleaner自主识别垃圾并清理
自动回港与自主充电
系统集成高精度定位自动靠泊算法,实现精准返航对接。
无人船在低电量状态下可自主规划返航路径,精准对接码头并完成自动充电,实现全过程自动化。
充电过程采用专用对接机构与保护电路,配合电池管理系统,实现对充电过程的安全监控。单次充电续航可满足全天作业需求。
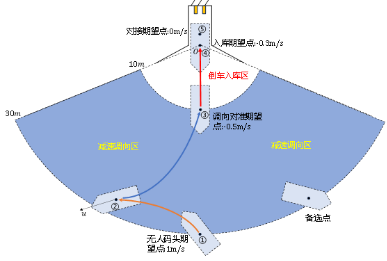
图:净航者Ⅰ S-Cleaner自动回港充能示意
多任务拓展能力
净航者Ⅰ船体预留通用通讯接口,可根据应用需求搭载多种传感器,包括水质多参数检测仪、ADCP、侧扫声呐、多波束测深系统等。
换装任务载荷后,平台可拓展至水质监测、水下探测、水文测量等应用场景。
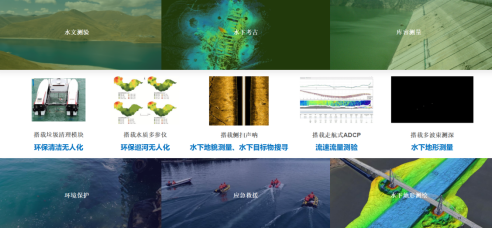
图:净航者Ⅰ S-Cleaner传感器拓展与作业功能
/ 作业流程
系统任务规划完成后,全部作业流程无需人工干预。
无人船自主执行水面清洁任务,低电量时自动返港充电,靠泊后可自动将垃圾舱内垃圾转运至码头,实现长期自动化水面作业。
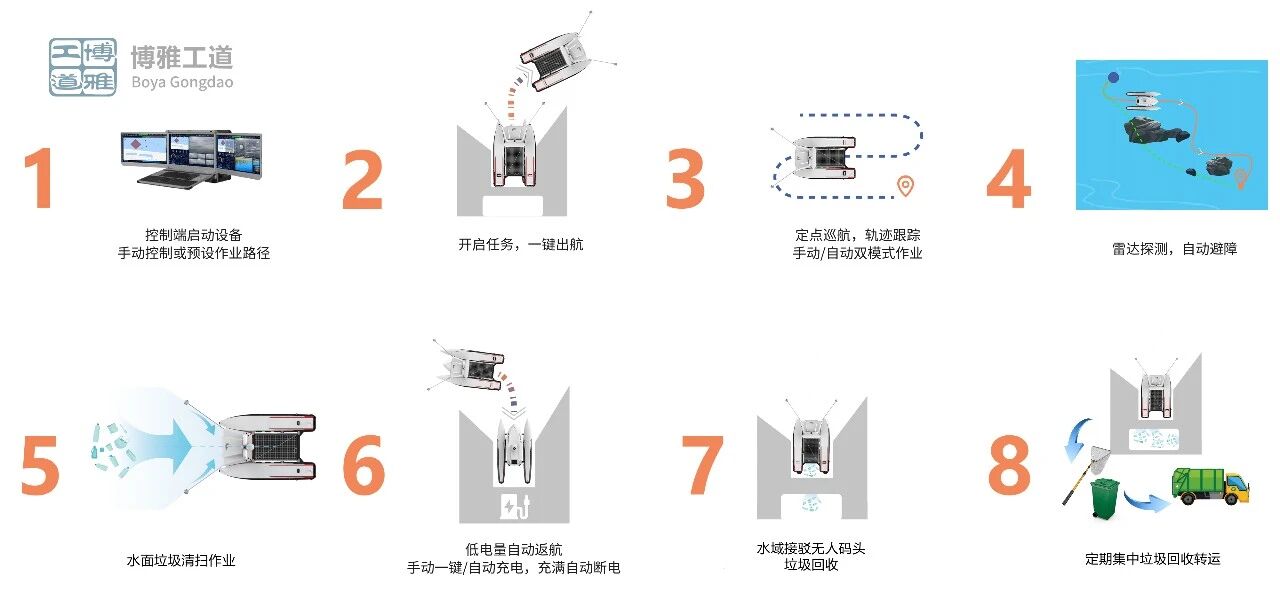
图:净航者Ⅰ S-Cleaner作业流程示意
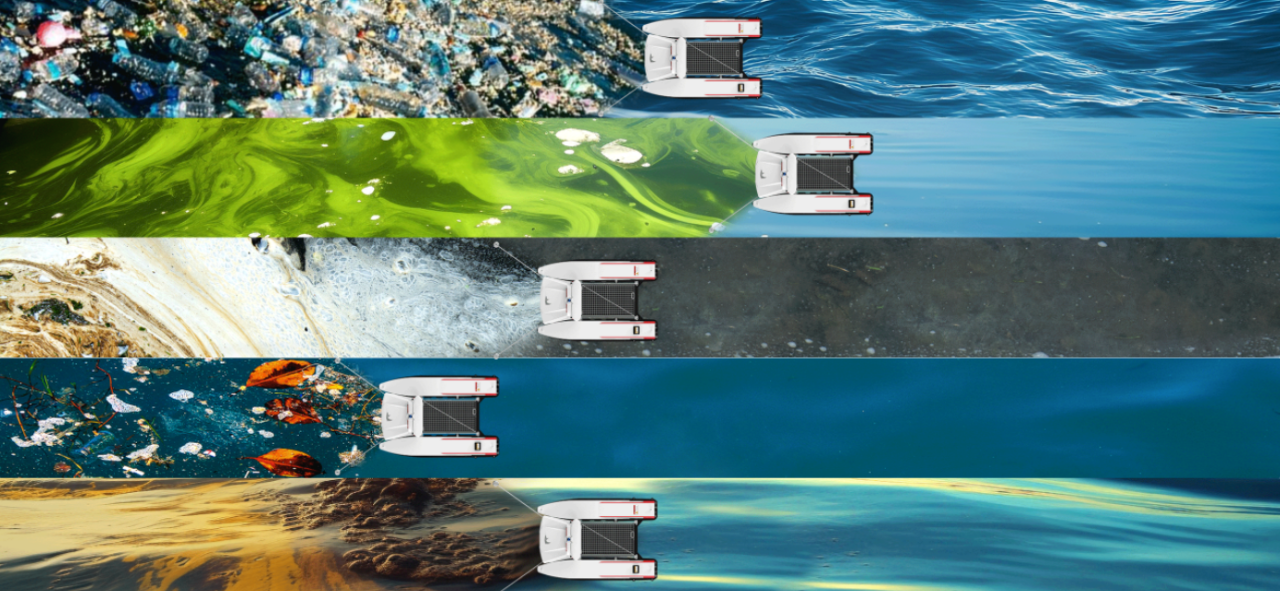
/ 适用场景
净航者Ⅰ适用于近岸港口、内陆景区、小型湖泊、河流、水库等水域,可满足常态化水面垃圾清理及水域监测作业需求。
配合无人码头部署后,可实现全天候无人值守式作业能力。
净航者Ⅰ水域清洁无人船系统,以智能化、无人化技术赋能水面环保作业,为各类水域提供全天候常态化清洁解决方案。系统已在三亚南山港、中心渔港等地开展应用验证,后续将持续优化完善,助力水域环境治理提质增效。


