



















-
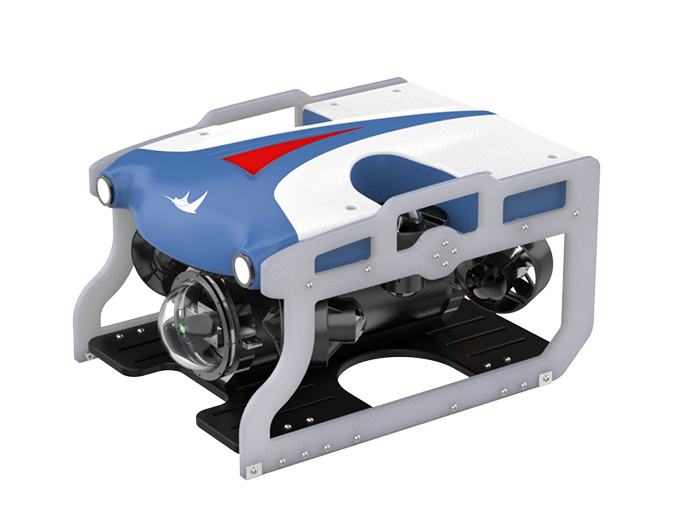 锂电版小型观测级水下机器人
锂电版小型观测级水下机器人R-20Li
自带能源、灵活作业了解更多 > -
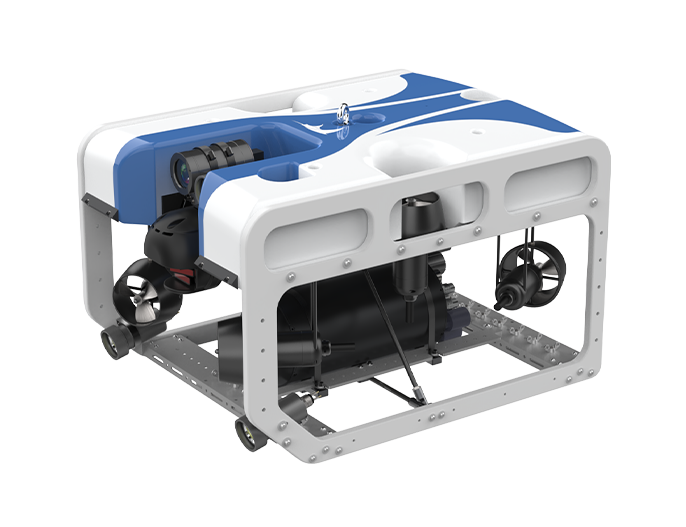
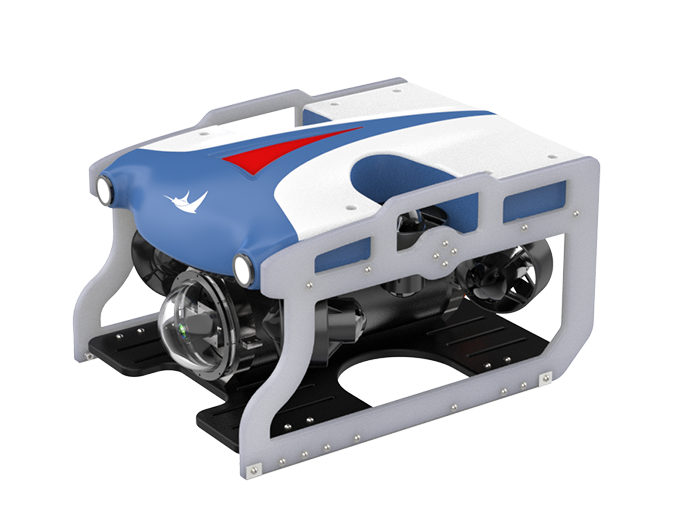 小型观测级水下机器人
小型观测级水下机器人R-20
操作便携、救援能手了解更多 > -
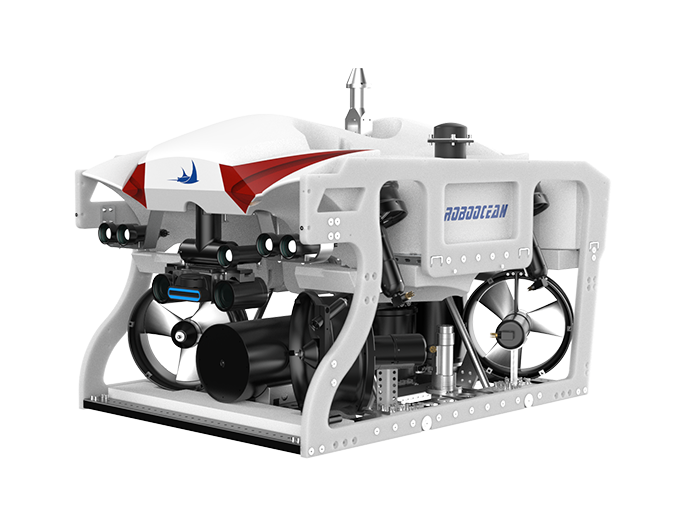
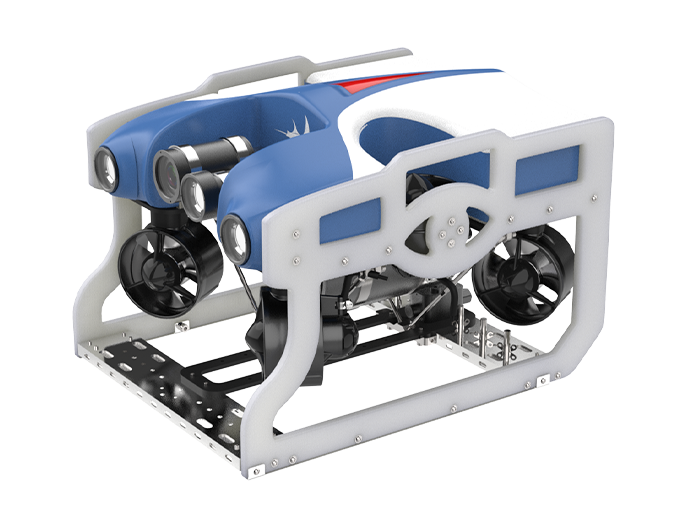 中型观测级水下机器人
中型观测级水下机器人R-30
图像增强、目标识别了解更多 > -
 中型观测级水下机器人
中型观测级水下机器人R-45
负载能力强、应用场景广了解更多 >
-
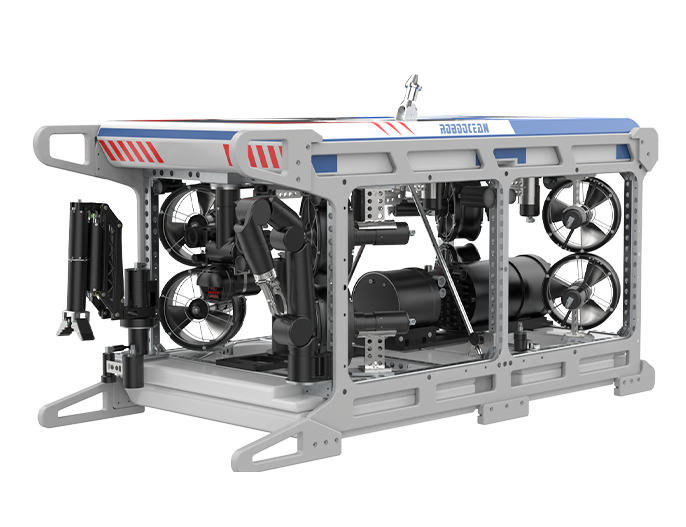
 轻型作业级水下机器人
轻型作业级水下机器人R-150
轻型海工作业了解更多 > -
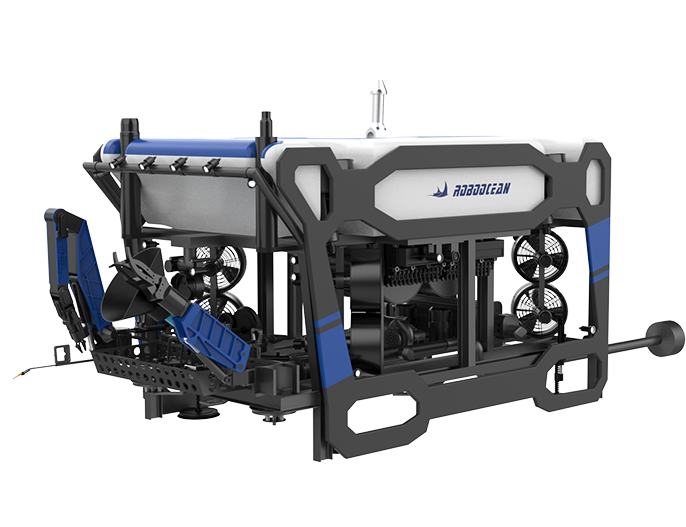
 中型作业级水下机器人
中型作业级水下机器人R-400
适应中远海作业了解更多 > -
 重型作业级水下机器人
重型作业级水下机器人R-1T
大深度科考了解更多 > -
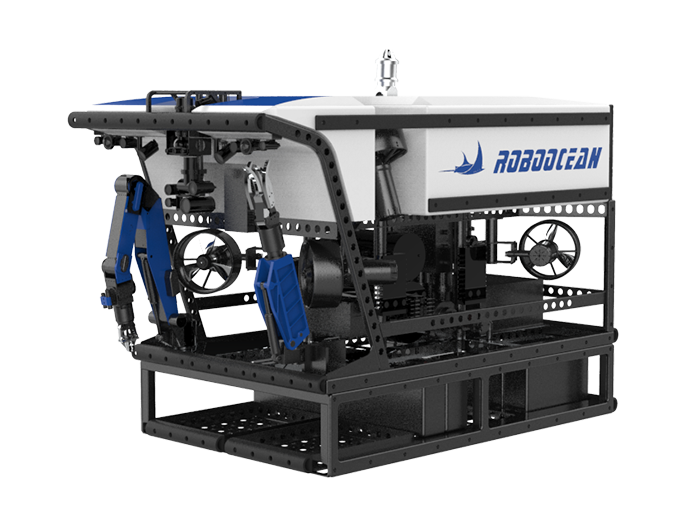 重型作业级水下机器人
重型作业级水下机器人R-3T
全电驱动、重型作业了解更多 >
National Defense
打捞搜索

Oil and Gas
海洋石油
Offshore Wind Power
海上风电
Hydropower
水利水电
Pipeline inspection
地下管线
Search and Rescue
安全搜救

Science and Education
科研教学




合作伙伴